理想汽车发布端侧大模型“软硬协同设计定律”,定义下一代智能驾驶芯片架构新范式
SmartHey汽车3月2日消息,近日,理想汽车联合国创决策智能技术研究所正式发布端侧大模型“软硬协同设计定律”,提出面向车载与边缘场景的大模型软硬一体化设计方法,为下一代智能驾驶芯片的架构定义提供了系统性理论基础。
这一成果不仅是理论层面的重要突破,更标志着理想汽车在辅助驾驶全栈自研能力上迈入新阶段。其从大模型到专用芯片的联合设计能力,体现了算法与硬件深度融合的关键进展。
当前,辅助驾驶正加速迈向全场景化,车载算力平台却面临核心矛盾:一方面,以大语言模型为核心的视觉-语言-行动(VLA)系统亟需更强环境理解与决策能力;另一方面,车规级芯片在功耗、散热与成本方面存在严苛约束,“堆算力换智能”的传统路径已难以为继。简言之,要让车辆拥有更聪明的“超级大脑”,却不能无限制扩大“脑容量”。
由此,未来竞争的核心将转向——谁能在有限资源下,把每一分算力用得更精准、更高效。全球科技领军企业正竞相探索“软硬协同设计”新范式,而理想汽车通过产学研深度协作,推动中国原创技术在全球智能驾驶标准制定中掌握主动权。
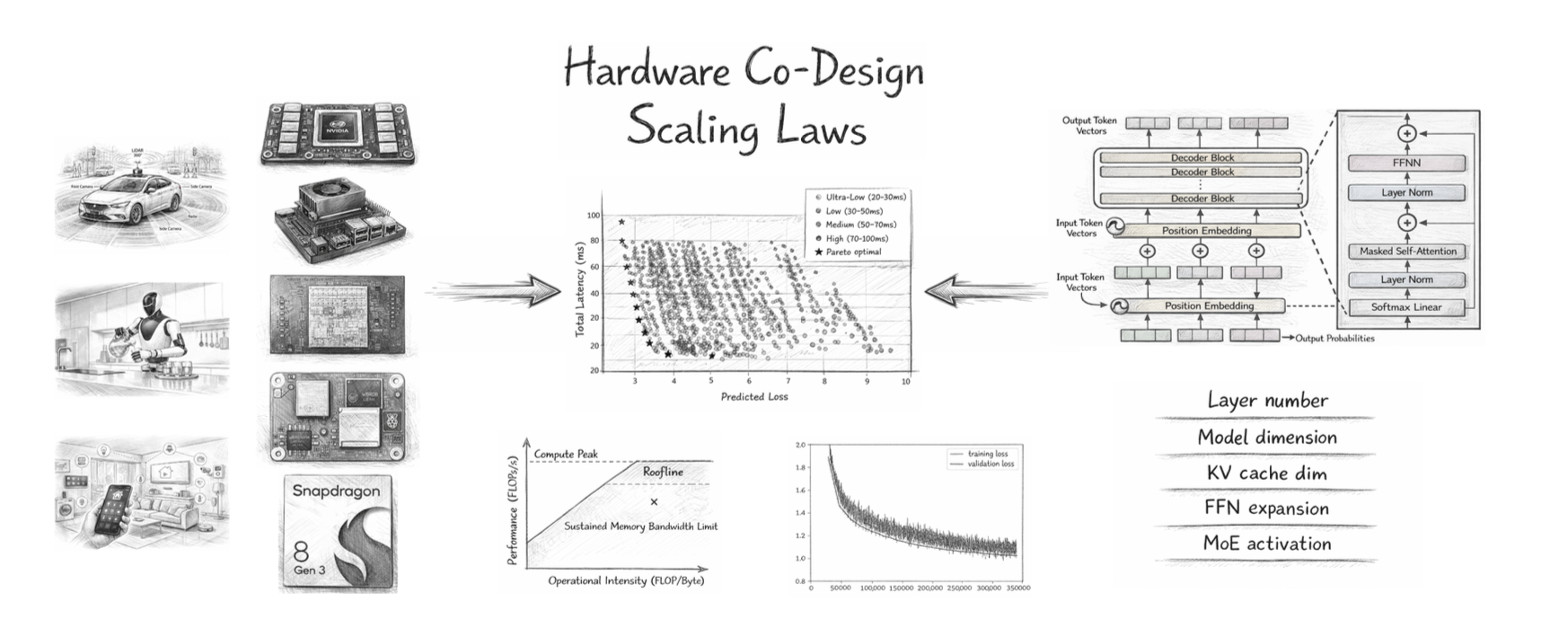
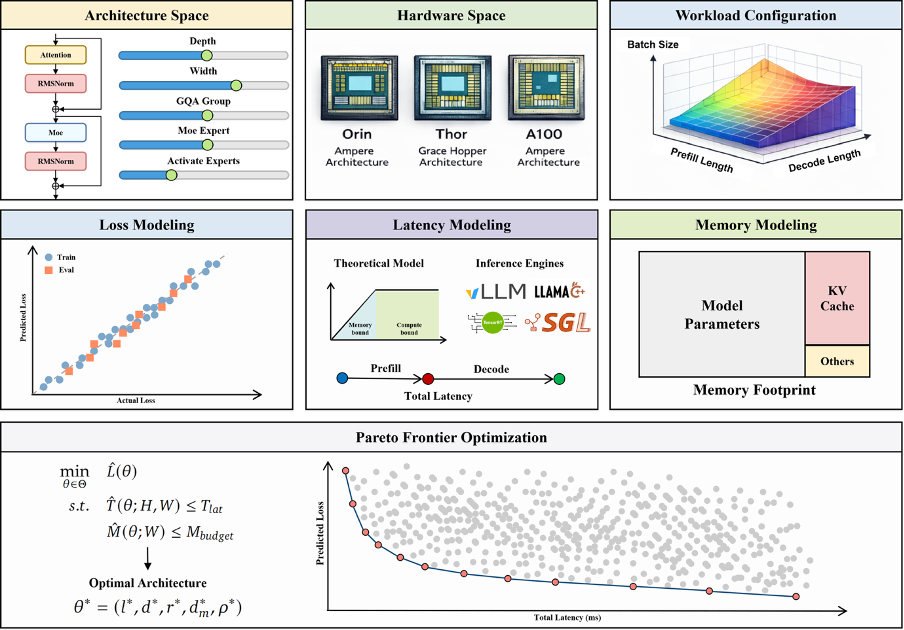
此次发布的“软硬协同设计定律”,首次构建了可量化、可预测的数学建模框架,对模型精度与推理延迟进行联合优化,实现算法架构与硬件资源的系统级匹配,彻底打破过去“先做芯片再适配算法”或“先写算法再找硬件”的割裂开发模式。
在现有成熟车载平台上的实测表明:在推理延迟不变的前提下,经协同优化后的模型精度显著提升。这验证了一个关键结论——智能水平的跃升,并不依赖算力盲目增长,而可通过算法与硬件的深度耦合,实现系统能效质的飞跃。
依托该研究,理想汽车正在研发的下一代自研智能驾驶芯片,将以算法需求为起点进行原生架构定义,从底层支持稀疏计算、动态资源调度与混合精度推理,打造真正面向车载VLA系统的“算法原生芯片”,兼顾更高能效比与更强智能表现。

未来,理想汽车将持续推进算法与芯片的协同创新,加速端侧大模型在辅助驾驶场景中的规模化落地,为用户带来更安全、更高效、更自然的智能出行体验。