众擎机器人公布人形机器人视觉起身控制专利
天眼查知识产权信息显示,近日,深圳市众擎机器人科技有限公司申请的“一种人形机器人视觉起身控制的方法及人形机器人”专利公布。
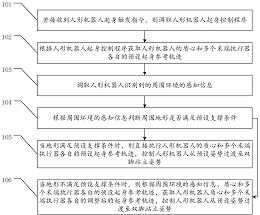
摘要显示,本申请用于提升起身动作在真实场景下的稳定性与成功率。本申请方法包括:若接收到人形机器人起身触发指令,则调取人形机器人起身控制程序;根据人形机器人起身控制程序获取人形机器人的质心和多个末端执行器各自的预设起身参考轨迹;调取人形机器人识别到的周围环境的感知信息;根据周围环境的感知信息判断周围地形是否满足预设支撑条件;当地形不满足预设支撑条件时,则根据周围环境的感知信息、质心和多个末端执行器各自的预设起身参考轨迹,获取人形机器人质心和多个末端执行器各自的调整后的起身参考轨迹,控制人形机器人从预设姿势过渡至双脚站立姿势。

本文转载自天眼查,转载目的在于传递更多信息,并不代表本站赞同其观点和对其真实性负责。如涉及作品内容、版权和其它问题,请联系天眼查通知我方删除,我方将在收到通知后第一时间删除内容!本文只提供参考并不构成任何投资及应用建议。本站拥有对此声明的最终解释权。